Шаговый двигатель с регулятором оборотов - Управление шаговым двигателем Электроника для всех
")
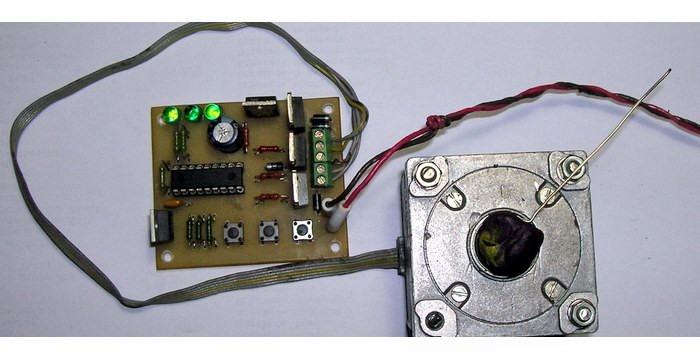
Выбираем драйвер шагового двигателя
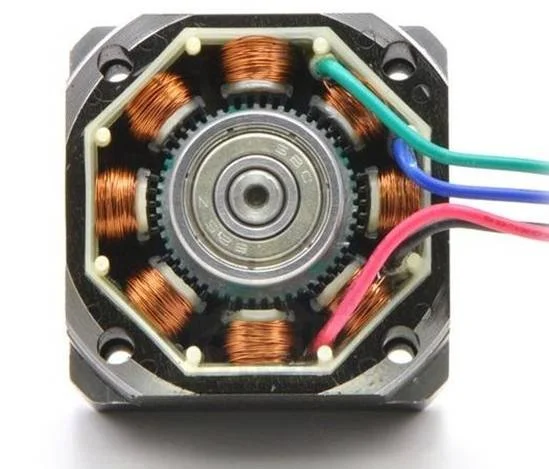
Двигатели постоянного тока ДПТ с постоянными магнитами начинают работать сразу, как только к якорной обмотке будет приложено постоянное напряжение. Переключение направления тока через обмотки ротора осуществляется механическим коммутатором — коллектором. Постоянные магниты при этом расположены на статоре. Обмотки ШД являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала.












Шаговые двигатели — типы, устройство и принцип работы, подключение и управление. Шаговый двигатель ШД — бесщеточный механизм с несколькими обмотками и последовательной подачей напряжения на каждую из них. Первые экземпляры электрических моторов такого типа появились еще в х годах, и почти за лет устройство претерпело значительных изменений Rinat Pak. Электроника и микроконтроллеры для всех. ШИМ регулятор на NE для управления яркостью и оборотами электро двигателя своими руками.










Сервошаговые двигатели применяются в станках с ЧПУ наряду с обычными шаговыми моторами. Энкодер позволяет создать обратную связь между двигателем и драйвером. Управляется он как полноценный серводвигатель, то есть с контролем положения и скорости, что позволяет получить максимальную отдачу от двигателя по моменту и исключить пропуск шагов при перегрузке.